Lane Detection
OpenCV pipeline
Original Image

Transform and Sobel Filter result
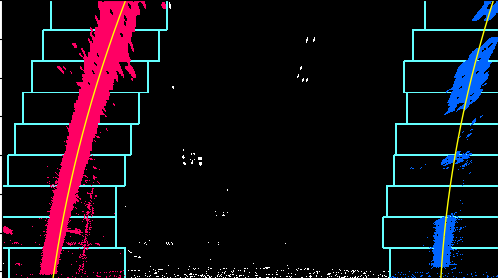
Sliding Window and curve fitting

Final Result
I recently became interested in working with computer vision. The idea of being able to make a machine 'see' has been around for a long time now, but it still fascinates me nonetheless. So, I took the initiative and set out to become more familiar with it. Along the way of doing so, I came across a python library called "OpenCV"
One of the most practical applications of OpenCV I saw, was using it for the purposes of robotics and autonomous cars. Thus, my first attempt at using OpenCV was to detect lane lines on a road.
This first attempt of mine is shown below. Essentially, for every frame in a video, I:
- first make the image grayscale
- perform a Canny Edge Detection algorithim
- crop image to reigon of intrest
- perform Hough Line Transforms to determine locations of lane lines
This method was very rough, but gave a good idea of the task at hand.
After joining WATonomous, a student design team aiming to make a Level 4 self-driving car, I became even more interested in computer vision and set out to learn different methods of performing computer vision tasks.
The pipeline for the new method is as follows:
- perform a perspective transform to gain a bird's eye view
- use a Sobel Filter to get reigons of interest
- crop image to nearby lanes
- create a histogram out of the image, for determing general location of lane
- use a sliding window algorithm and fit a polynomial curve onto each lane line
- perform an inverse perspective transform
Below is a demo of the final result of this new lane detection pipeline
The next steps for this would be to possibly train a segnet, or some other kind of neural net to perform the lane detection.
- Github Repo
- Timeframe: 2A
- Relevant Technologies: Python, OpenCV