3D Printed Robotic Hand
A robotic hand that mimics the user

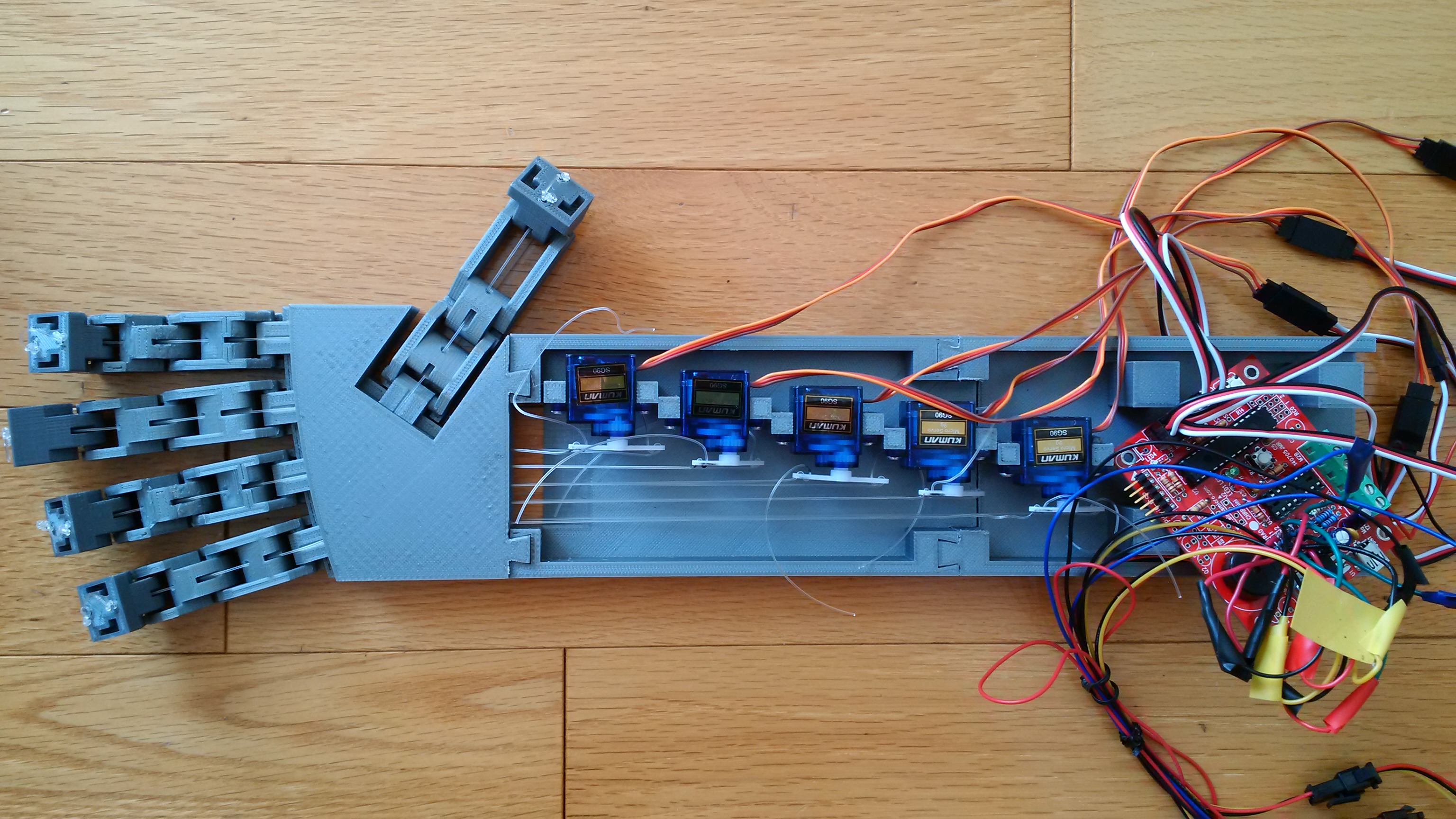
My goal was to make a robotic hand, that would mimic the movements of the user. I designed and 3D printed this hand. Each finger of the hand is controlled by a servo, attached by fishing line. Due to time constraints and shipping delays, I also designed the flex sensors seen on the glove; these were made with conductive foam and pieces of yogurt containers, as the resistance of the conductive foam changes as pressure is applied. The microcontroller measures the amount of this change, and adjusts the fingers accordingly. I had worked with Eric Schilha on this project.
The technical report for this project can be read here
The video below shows my robotic hand, mimicking the movements of the user wearing the flex-sensor glove I created.
Above is a demo video of the pre-programmed gestures I have put on the robotic hand.
- Github Repo
- Timeframe: Grade 11
- Relevant Technologies: C, Fusion360